修复(去噪与反卷积)
本节简要回顾图像修复:利用噪声/模糊模型和正则化,从退化的观测中按原则恢复清晰图像。
概述¶
修复将图像恢复问题表述为一个反问题。给定观测模型(如噪声、点扩散函数)和先验/正则化项,我们估计能够最好地解释观测数据的图像。
# 配置中文字体以避免 Matplotlib 中文缺字警告
import matplotlib.pyplot as plt
# 按优先级尝试不同的中文字体(同 fourier.ipynb 方法)
plt.rcParams['font.sans-serif'] = [
'Noto Sans CJK SC', 'Noto Sans CJK JP', 'SimHei',
'Microsoft YaHei', 'WenQuanYi Micro Hei', 'DejaVu Sans'
]
plt.rcParams['axes.unicode_minus'] = False
# Prepare a base image and noisy variants so downstream cells can run standalone
import numpy as np
import matplotlib.pyplot as plt
from skimage import data
from skimage.util import random_noise
# Load a sample grayscale image
image = data.camera()
# Create noisy versions used in later examples
gaussian_noisy = random_noise(image, mode='gaussian', var=0.05)
poisson_noisy = random_noise(image, mode='poisson')
salt_pepper_noisy = random_noise(image, mode='s&p', amount=0.05)
噪声来源¶
数字图像中的主要噪声来源是在采集过程中(收集到的光子数量太少、传感器温度……)或在任何传输过程中(无线通信中的回声和大气失真)。在某些情况下,噪声也被用来模拟图像形成数学模型中的不准确性,因为后者与现实相比必然存在差异,就像任何物理模型一样!
噪声本质上是一种随机现象,通过表示其强度分布的概率密度进行建模。
在下文中,我们用 表示观测到的(带噪声的)图像, 表示噪声, 表示无噪声的图像。
加性高斯白噪声¶
加性高斯白噪声(AWGN)将观测图像 的每个像素 建模为无噪声图像 的像素 与噪声 的一个像素之和:
其中 。
这个模型很简单,便于计算。它被用于包括摄影在内的大多数应用中。
泊松噪声¶
泊松噪声(也称散粒噪声)模拟光子在光敏元件上的采集过程。光子的数量是随机的,并取决于光照强度。相应的泊松过程的均值等于光照强度。观测图像 的每个像素 的强度为:
该模型用于光子数量较少的采集情况,例如在天文学中。
椒盐噪声¶
椒盐噪声,也不太诗意地称为脉冲噪声,模拟了饱和或失效的像素(由于光敏元件故障或饱和)。
其中 和 是强度的最小值和最大值。
# 用于设置依赖和显示噪声示例的代码块
# 如果尚未安装scikit-image,则安装
try:
import skimage
except ImportError:
# %pip install scikit-image
print("scikit-image not installed. Please install it to run this cell.")
import numpy as np
import matplotlib.pyplot as plt
from skimage import data
from skimage.util import random_noise
# 加载示例图像
image = data.camera()
# --- 向图像添加噪声 ---
# 高斯噪声
gaussian_noisy = random_noise(image, mode='gaussian', var=0.05)
# 泊松噪声
poisson_noisy = random_noise(image, mode='poisson')
# 椒盐噪声
salt_pepper_noisy = random_noise(image, mode='s&p', amount=0.05)
# --- 显示结果 ---
fig, axes = plt.subplots(1, 4, figsize=(20, 5))
ax = axes.ravel()
ax[0].imshow(image, cmap='gray')
ax[0].set_title('原始图像')
ax[0].axis('off')
ax[1].imshow(gaussian_noisy, cmap='gray')
ax[1].set_title('高斯噪声')
ax[1].axis('off')
ax[2].imshow(poisson_noisy, cmap='gray')
ax[2].set_title('泊松噪声')
ax[2].axis('off')
ax[3].imshow(salt_pepper_noisy, cmap='gray')
ax[3].set_title('椒盐噪声')
ax[3].axis('off')
plt.tight_layout()
plt.show()
噪声功率¶
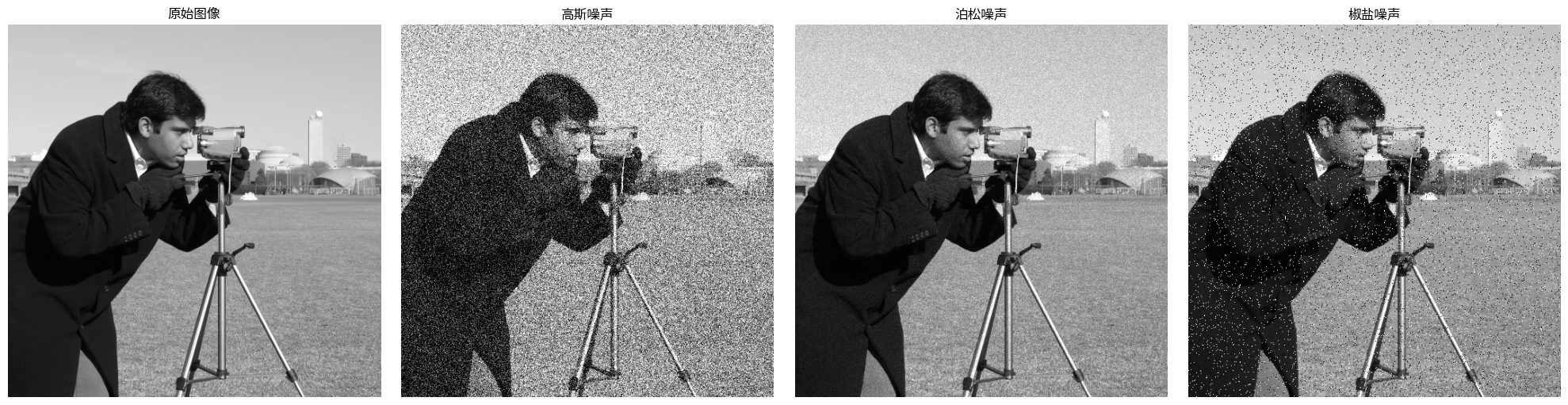
Figure 2 说明了先前噪声在同一图像上的效果。 可以观察到:
对于高斯噪声,整个图像受到同样方式的噪声影响,
对于泊松噪声,较亮的部分比较暗的部分噪声更大,
对于脉冲噪声,只有少数像素被修改,并被替换为黑色或白色像素。

Figure 2:不同类型噪声的示例(功率几乎相同)。
信噪比(SNR)是衡量噪声水平的指标。 它定义为无噪声图像的功率与噪声功率之比, 其中图像 的功率定义为:
因为SNR通常以对数刻度(单位:分贝)表示,所以它也定义为:
对于加性噪声,存在另一个度量: 峰值信噪比(PSNR)是无噪声图像的平方动态范围(最大强度与最小强度之差)与噪声功率之比:
Figure 3 表示在不同SNR和PSNR下,被加性高斯白噪声污染的同一图像。 如您所见,当SNR或PSNR增加时,噪声会减小!

Figure 3:不同SNR和PSNR下的带噪图像。
from skimage.metrics import peak_signal_noise_ratio
def signal_to_noise_ratio(true_image, noisy_image):
"""计算信噪比。"""
# 确保图像为浮点类型以便计算
true_image = true_image.astype(np.float64)
noisy_image = noisy_image.astype(np.float64)
# 计算噪声
noise = true_image - noisy_image
# 计算信号和噪声的功率
signal_power = np.sum(true_image**2)
noise_power = np.sum(noise**2)
# 计算信噪比
if noise_power == 0:
return float('inf')
snr = 10 * np.log10(signal_power / noise_power)
return snr
# --- 计算并打印带噪图像的SNR和PSNR ---
# 注意:scikit-image的random_noise会将图像缩放到[0, 1]或[-1, 1]
# 因此我们需要注意数据范围。我们将使用skimage的PSNR
# 来处理这个问题。对于SNR,我们的自定义函数是合适的。
# 原始图像是uint8,random_noise会将其转换为[0,1]范围内的float64。
image_float = image / 255.0
psnr_gaussian = peak_signal_noise_ratio(image_float, gaussian_noisy)
snr_gaussian = signal_to_noise_ratio(image_float, gaussian_noisy)
# 对于泊松噪声和椒盐噪声,噪声不完全是加性的,但我们仍然可以计算这些指标。
psnr_poisson = peak_signal_noise_ratio(image_float, poisson_noisy)
snr_poisson = signal_to_noise_ratio(image_float, poisson_noisy)
psnr_sp = peak_signal_noise_ratio(image_float, salt_pepper_noisy)
snr_sp = signal_to_noise_ratio(image_float, salt_pepper_noisy)
print(f"高斯噪声 -> SNR: {snr_gaussian:.2f} dB, PSNR: {psnr_gaussian:.2f} dB")
print(f"泊松噪声 -> SNR: {snr_poisson:.2f} dB, PSNR: {psnr_poisson:.2f} dB")
print(f"椒盐噪声 -> SNR: {snr_sp:.2f} dB, PSNR: {psnr_sp:.2f} dB")
高斯噪声 -> SNR: 9.52 dB, PSNR: 14.21 dB
泊松噪声 -> SNR: 22.37 dB, PSNR: 27.06 dB
椒盐噪声 -> SNR: 13.04 dB, PSNR: 17.73 dB
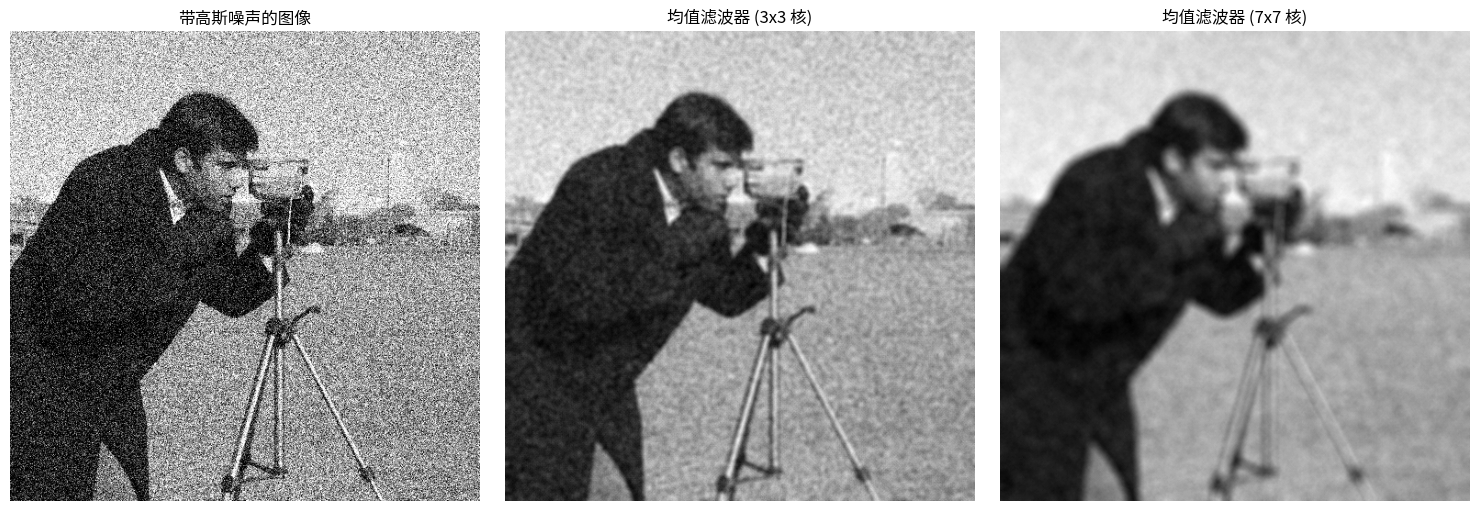
均值滤波器¶
均值滤波器是一种非常简单的去噪方法。 去噪图像 的每个像素 是带噪图像 中 周围像素的平均值:
其中
是邻域,即 周围的像素集;
是 的基数,即邻域中的像素数。
Figure 4 说明了均值滤波器对于不同邻域大小的效果。 如果邻域增大,则噪声减小,但同时图像变得更模糊。

Figure 4:均值滤波器大小的效果。
均值滤波器可以用卷积积表示。 确实,考虑邻域是大小为 像素的正方形的情况, 那么均值滤波器的定义给出:
其中
这个定义可以扩展到任何类型的核 ! 例如,Figure 5 给出了两种不同核的结果。

Figure 5:两种不同核的均值滤波器。
总结:
均值滤波器计算邻域中像素的平均值,
均值滤波器可以写成卷积,
通过平均强度来减少噪声,但图像会变模糊。
from skimage.filters import rank
from skimage.morphology import disk
from skimage.util import img_as_ubyte
# rank 滤波器期望 8-bit 输入;将浮点噪声图转为 uint8
gaussian_noisy_u8 = img_as_ubyte(gaussian_noisy)
# 应用不同核大小的均值滤波器(uint8 输入/输出)
mean_denoised_3 = rank.mean(gaussian_noisy_u8, footprint=disk(3))
mean_denoised_7 = rank.mean(gaussian_noisy_u8, footprint=disk(7))
# --- 显示结果 ---
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
ax = axes.ravel()
ax[0].imshow(gaussian_noisy, cmap='gray')
ax[0].set_title('带高斯噪声的图像')
ax[0].axis('off')
ax[1].imshow(mean_denoised_3, cmap='gray')
ax[1].set_title('均值滤波器 (3x3 核)')
ax[1].axis('off')
ax[2].imshow(mean_denoised_7, cmap='gray')
ax[2].set_title('均值滤波器 (7x7 核)')
ax[2].axis('off')
plt.tight_layout()
plt.show()
# --- 计算并打印去噪图像的PSNR ---
mean3_float = mean_denoised_3.astype(np.float64) / 255.0
mean7_float = mean_denoised_7.astype(np.float64) / 255.0
psnr_mean_3 = peak_signal_noise_ratio(image_float, mean3_float, data_range=1.0)
psnr_mean_7 = peak_signal_noise_ratio(image_float, mean7_float, data_range=1.0)
print(f"PSNR (均值 3x3): {psnr_mean_3:.2f} dB")
print(f"PSNR (均值 7x7): {psnr_mean_7:.2f} dB")
PSNR (均值 3x3): 23.27 dB
PSNR (均值 7x7): 21.83 dB
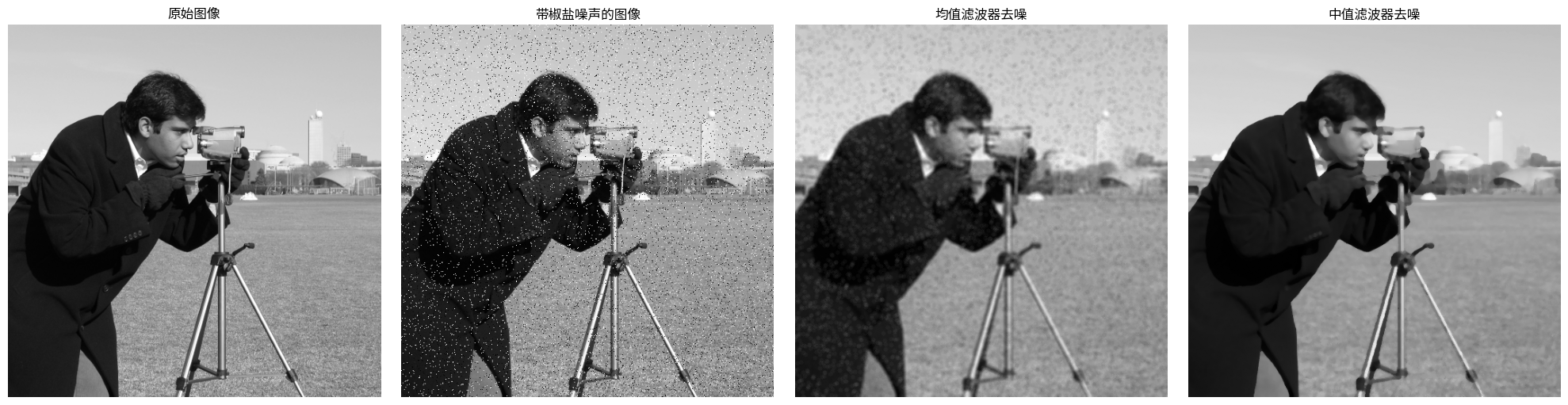
中值滤波器¶
一组数的中值是集合中的元素 , 使得小于 的数和大于 的数一样多。 例如, 的中值是 4。
中值滤波器定义为:
中值滤波器非常适合用于去除椒盐噪声, 因为它不会像均值滤波器那样使图像模糊。
尽管名为滤波器,但中值滤波器不是一个线性滤波器,因为它不满足线性性质。 因此它不能写成卷积的形式。

Figure 6:均值滤波器和中值滤波器在椒盐噪声图像上的比较。
# --- 比较均值和中值滤波器对椒盐噪声的效果 ---
from skimage.util import img_as_ubyte
# rank.mean 期望 uint8;先将输入转换为 uint8
sp_u8 = img_as_ubyte(salt_pepper_noisy)
mean_denoised_sp = rank.mean(sp_u8, footprint=disk(3))
# 中值滤波器也接受 uint8;保持不变
median_denoised_sp = rank.median(sp_u8, footprint=disk(3))
# --- 显示结果 ---
fig, axes = plt.subplots(1, 4, figsize=(20, 5))
ax = axes.ravel()
ax[0].imshow(image, cmap='gray')
ax[0].set_title('原始图像')
ax[0].axis('off')
ax[1].imshow(salt_pepper_noisy, cmap='gray')
ax[1].set_title('带椒盐噪声的图像')
ax[1].axis('off')
ax[2].imshow(mean_denoised_sp, cmap='gray')
ax[2].set_title('均值滤波器去噪')
ax[2].axis('off')
ax[3].imshow(median_denoised_sp, cmap='gray')
ax[3].set_title('中值滤波器去噪')
ax[3].axis('off')
plt.tight_layout()
plt.show()
# --- 计算并打印去噪图像的PSNR ---
mean_sp_float = mean_denoised_sp.astype(np.float64) / 255.0
median_sp_float = median_denoised_sp.astype(np.float64) / 255.0
psnr_mean_sp = peak_signal_noise_ratio(image_float, mean_sp_float, data_range=1.0)
psnr_median_sp = peak_signal_noise_ratio(image_float, median_sp_float, data_range=1.0)
print(f"PSNR (均值滤波器对椒盐噪声): {psnr_mean_sp:.2f} dB")
print(f"PSNR (中值滤波器对椒盐噪声): {psnr_median_sp:.2f} dB")
PSNR (均值滤波器对椒盐噪声): 25.03 dB
PSNR (中值滤波器对椒盐噪声): 27.63 dB
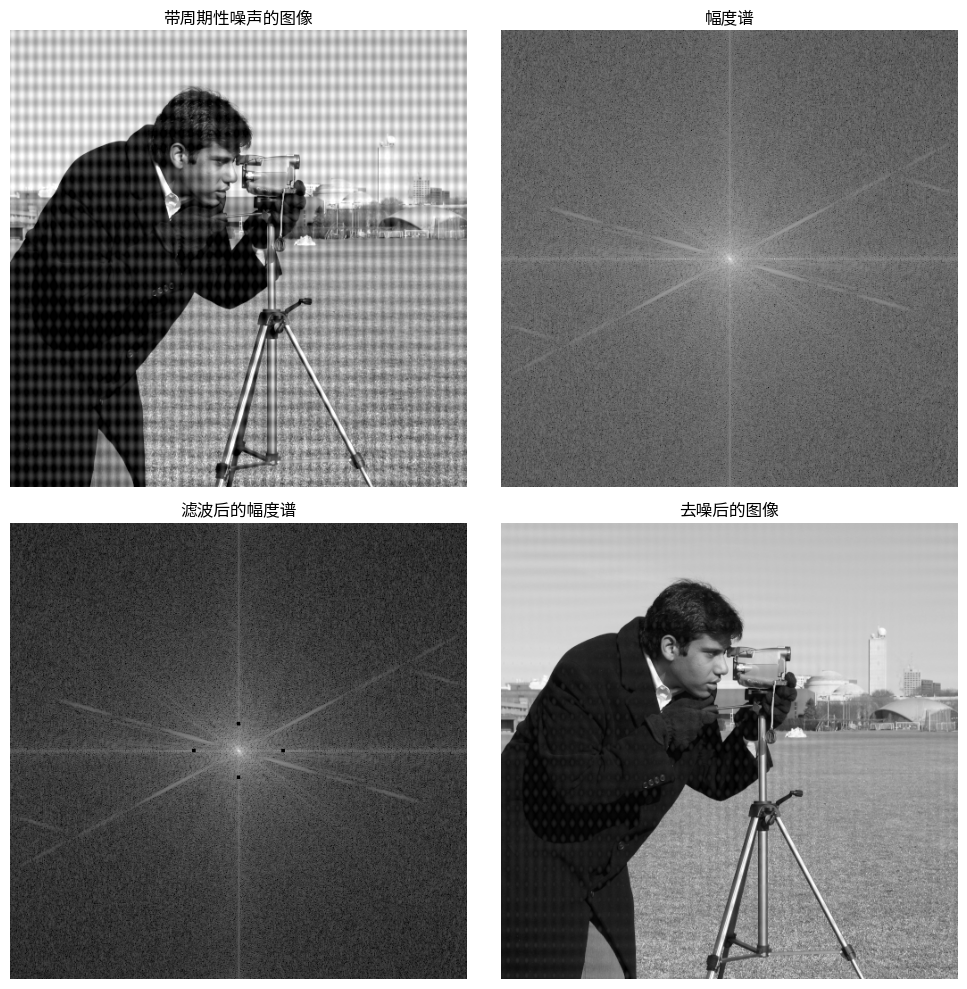
周期性噪声滤波¶
周期性噪声的特点是在傅里叶变换中呈现为结构性图案。 这些结构可以通过在傅里叶域中应用一个掩模来消除相应的系数,从而被移除。 去噪后的图像随后通过逆傅里叶变换得到。

Figure 7:对月球照片进行周期性噪声滤波: 图像中的周期性伪影被清除。
from scipy import fftpack
# --- 创建周期性噪声 ---
# 创建一个带周期性噪声的合成图像
rows, cols = image.shape
crow, ccol = rows // 2 , cols // 2
u, v = 30, 50 # 噪声的频率分量
# 创建正弦噪声
noise = np.zeros((rows, cols), dtype=np.float64)
for r in range(rows):
for c in range(cols):
noise[r, c] = 20 * (np.sin(2 * np.pi * u * r / rows) + np.sin(2 * np.pi * v * c / cols))
# 将噪声添加到图像中
periodic_noisy = np.clip(image_float + noise / 255.0, 0, 1)
# --- 傅里叶变换与滤波 ---
# 计算傅里叶变换
f_transform = fftpack.fft2(periodic_noisy)
f_shift = fftpack.fftshift(f_transform)
magnitude_spectrum = 20 * np.log(np.abs(f_shift))
# 创建一个掩模以移除周期性噪声
mask = np.ones_like(f_shift, dtype=bool)
# 噪声尖峰以水平和垂直轴为中心呈对称分布,因此我们将它们掩蔽掉
mask[crow - u - 2 : crow - u + 2, ccol - 2 : ccol + 2] = False
mask[crow + u - 2 : crow + u + 2, ccol - 2 : ccol + 2] = False
mask[crow - 2 : crow + 2, ccol - v - 2 : ccol - v + 2] = False
mask[crow - 2 : crow + 2, ccol + v - 2 : ccol + v + 2] = False
# 应用掩模
f_shift_filtered = f_shift * mask
magnitude_spectrum_filtered = 20 * np.log(np.abs(f_shift_filtered) + 1) # 加1以避免log(0)
# --- 逆傅里叶变换 ---
f_ishift = fftpack.ifftshift(f_shift_filtered)
image_filtered = fftpack.ifft2(f_ishift)
image_filtered = np.abs(image_filtered)
# --- 显示结果 ---
fig, axes = plt.subplots(2, 2, figsize=(10, 10))
ax = axes.ravel()
ax[0].imshow(periodic_noisy, cmap='gray')
ax[0].set_title('带周期性噪声的图像')
ax[0].axis('off')
ax[1].imshow(magnitude_spectrum, cmap='gray')
ax[1].set_title('幅度谱')
ax[1].axis('off')
ax[2].imshow(magnitude_spectrum_filtered, cmap='gray')
ax[2].set_title('滤波后的幅度谱')
ax[2].axis('off')
ax[3].imshow(image_filtered, cmap='gray')
ax[3].set_title('去噪后的图像')
ax[3].axis('off')
plt.tight_layout()
plt.show()
TV正则化¶
从某种角度看,去噪的目标是获得一个图像 , 它不仅像素间的强度变化小,而且接近观测值 。 TV正则化(total variation) [Rudin et al. 1992, Chambolle 2004] 是一种去噪方法,它通过数学函数(即所谓的“准则”)来描述这两个目标。
希望去噪图像 接近观测值 的愿望,产生了一个“数据拟合”准则, 该准则衡量 和 之间的差异。 一个经典的选择是最小二乘准则:
确实,为了使 减小,我们必须找到一个接近 的图像 。
希望图像强度变化小的愿望,产生了一个“正则化”准则, 该准则衡量 的相邻像素之间的差异。 一个简单的选择是“总变分”:
因此,为了使 减小,无论是行还是列,两个连续像素之间的差异都必须很小。 这意味着图像 的强度几乎是恒定的。
目标是找到一个既能最小化数据拟合又能最小化正则化的图像 。 在数学上,我们寻找最小化 的图像 , 其中 是“正则化参数”, 用于调整两个准则之间的权衡。 的值由用户选择。 在数学上,我们写成:
这变成了一个优化问题,有大量的算法可以最小化 。

Figure 8:使用TV正则化去噪,对应两个不同的 值。
from skimage.restoration import denoise_tv_chambolle
# --- 应用总变分 (TV) 去噪 ---
# 我们使用带高斯噪声的图像作为输入
tv_denoised_low = denoise_tv_chambolle(gaussian_noisy, weight=0.1)
tv_denoised_high = denoise_tv_chambolle(gaussian_noisy, weight=0.2)
# --- 显示结果 ---
fig, axes = plt.subplots(1, 4, figsize=(20, 5))
ax = axes.ravel()
ax[0].imshow(image, cmap='gray')
ax[0].set_title('原始图像')
ax[0].axis('off')
ax[1].imshow(gaussian_noisy, cmap='gray')
ax[1].set_title('带高斯噪声的图像')
ax[1].axis('off')
ax[2].imshow(tv_denoised_low, cmap='gray')
ax[2].set_title('TV 去噪 (weight=0.1)')
ax[2].axis('off')
ax[3].imshow(tv_denoised_high, cmap='gray')
ax[3].set_title('TV 去噪 (weight=0.2)')
ax[3].axis('off')
plt.tight_layout()
plt.show()
# --- 计算并打印去噪后图像的PSNR ---
psnr_tv_low = peak_signal_noise_ratio(image_float, tv_denoised_low)
psnr_tv_high = peak_signal_noise_ratio(image_float, tv_denoised_high)
print(f"PSNR (TV 去噪, weight=0.1): {psnr_tv_low:.2f} dB")
print(f"PSNR (TV 去噪, weight=0.2): {psnr_tv_high:.2f} dB")
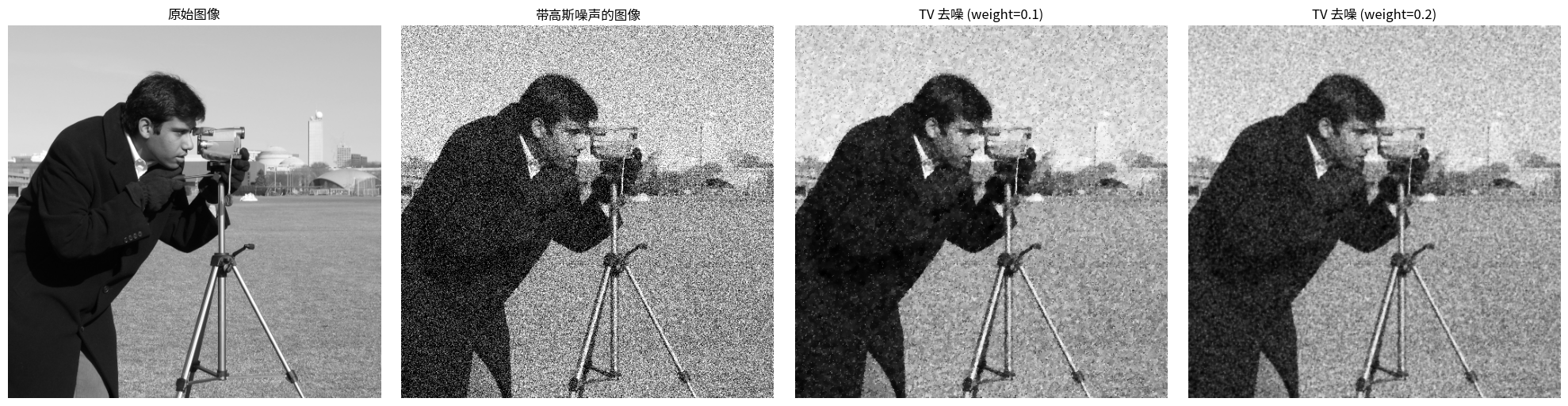
PSNR (TV 去噪, weight=0.1): 22.21 dB
PSNR (TV 去噪, weight=0.2): 22.54 dB
反卷积¶
通常,由视觉系统采集的图像会受到退化,这种退化可以建模为卷积。 例如,一些图像呈现出相机抖动效果(Figure 9) 或由于对焦不良导致的模糊(Figure 10)。 反卷积的目标是消除卷积的影响。

Figure 9:运动模糊的一个例子(由相机拍摄的布达佩斯议会大厦)。

Figure 10:哈勃望远镜在1996年拍摄的木卫三(Ganymede)。
退化现象的模型如Figure 11所示: 观测图像 受到与PSF 的卷积以及可能的噪声 (假设为加性噪声)的退化。
从观测图像 估计原始图像 的过程称为反卷积。这是一个经典的 反问题。
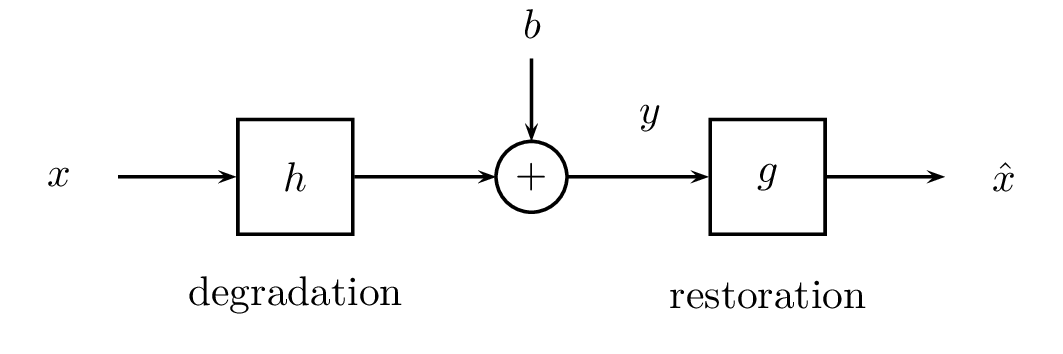
Figure 11:作为反问题的反卷积。
挑战在于卷积和加性噪声都破坏了原始信号。恢复 的难度在很大程度上取决于我们已知的信息:
非盲反卷积:我们假设PSF 是已知的。
如果 没有噪声 (),问题简化为 。理论上,我们可以通过“反转”卷积来恢复 。这就是 逆滤波器 背后的原理。
如果 存在噪声 (),简单地反转卷积会急剧放大噪声,导致结果很差。这需要更复杂的方法,如 维纳滤波器,它在去模糊和噪声抑制之间取得平衡。
盲反卷积:这是最具挑战性的情况,原始图像 和 PSF 都是未知的。这超出了我们当前的讨论范围,但它是一个活跃的研究领域。
在接下来的部分中,我们将专注于非盲反卷积,假设PSF 是已知的或可以被估计,并且我们有一个噪声模型。
逆滤波器¶
逆滤波器是最简单的反卷积方法。 由于退化模型为 ,该方程在傅里叶域中变为:
因此我们可以写出:
我们通过计算前一个表达式的逆傅里叶变换来得到 :
由于噪声(及其频谱 )是未知的, 我们可以通过在前一个表达式中将 置零来近似 , 从而得到反卷积图像:
逆滤波器应用于图像的结果在 Figure 12 中给出。 结果是不可用的,然而观察到的图像模糊很小,噪声也很少!

Figure 12:逆滤波器的结果。
逆滤波器的灾难性结果是由于假设噪声为零。 确实,根据 的定义并考虑 ,则:
因此,反卷积图像 对应于 加上一个附加项,即 的逆傅里叶变换。 PSF 通常是一个低通滤波器,因此对于高频 , 的值趋于 0。 因为 在分母中,这会急剧放大噪声的高频, 然后 项很快就主导了 。 这解释了 Figure 12 的结果。
一个解决方案是只考虑 的低频部分。 这相当于在计算逆傅里叶变换之前,通过将高频置零来截断逆滤波器的结果。 反卷积的结果变得可以接受得多,如 Figure 13 所示, 尽管结果仍然远非完美(物体周围存在许多强度变化,例如树干)...

Figure 13:截断逆滤波器在噪声很小的情况下的结果。
维纳滤波器¶
维纳滤波器,记为 (其傅里叶变换为 ),应用于观测值 使得:
该滤波器是在统计框架下建立的:图像 和噪声 被视为随机变量。 它们也被假定为统计上独立的。 因此,观测值 和估计值 也是随机变量。
为简单起见,计算在傅里叶域中进行(因为卷积变为乘法)。 维纳滤波器的目标是找到最接近 的图像 , 在均方误差 的意义上。 因此:
其中 是一个全为1的图像。 所以:
其中 表示变量的共轭。 由于期望 是线性的,并且只有 和 是随机变量, 我们可以将前一个表达式分解为四个项:
由于 和 是独立的,协方差 和 为零。 此外, 和 是功率谱密度,分别记为 和 (功率谱密度是傅里叶变换模的平方的期望)。 所以均方误差简化为:
我们寻找最小化MSE的滤波器 ,或者等价地,使MSE的导数等于零:
我们得到了维纳滤波器 的表达式! 最后,反卷积图像是 的逆傅里叶变换:
我们可以认为功率谱密度 和 是常数 (对于 ,需要假设是白噪声)。 因此,维纳滤波器的表达式可以写成
而 项被一个常数 代替,它成为该方法的参数,由用户设置。
两点说明:
当 趋于零时(通常在高频), 不再出现像逆滤波器那样的噪声放大问题, 因为滤波器趋于0,
此外,如果图像中没有噪声,则 ,维纳滤波器变回逆滤波器:
维纳滤波器的结果在 Figure 14 中展示: 它明显优于逆滤波器,甚至是其截断版本!

Figure 14:维纳滤波器的结果 ( 被设置为使得估计在MSE方面是最佳的)。
import numpy as np
import matplotlib.pyplot as plt
# ====================== 主脚本 ======================
def main():
"""
主函数,用于运行图像恢复流程。
它会加载一张图像,应用不同程度的运动模糊和噪声,
然后尝试使用逆滤波器和维纳滤波器恢复图像。
最后,它会计算并显示性能指标(MSE, PSNR, SSIM),
并展示处理后的图像。
"""
# ---------- 1. 加载并准备图像 ----------
try:
# 使用在前一个notebook单元格中预加载的'image'变量。
img = image
img = np.array(img, dtype=np.float64)
except NameError:
print("未找到图像'image'!请确保它已在前一个单元格中加载。")
return
except Exception as e:
print(f"加载图像时发生错误: {e}")
return
# ---------- 2. 转换为灰度图并归一化 ----------
# 如果图像是彩色的(3个维度),则使用标准的亮度公式将其转换为灰度图。
if img.ndim == 3:
R, G, B = img[:, :, 0], img[:, :, 1], img[:, :, 2]
I = 0.2989 * R + 0.5870 * G + 0.1140 * B
else:
I = img
# 将图像强度归一化到[0, 1]范围,以便进行一致的处理。
I = (I - I.min()) / (I.max() - I.min())
M, N = I.shape
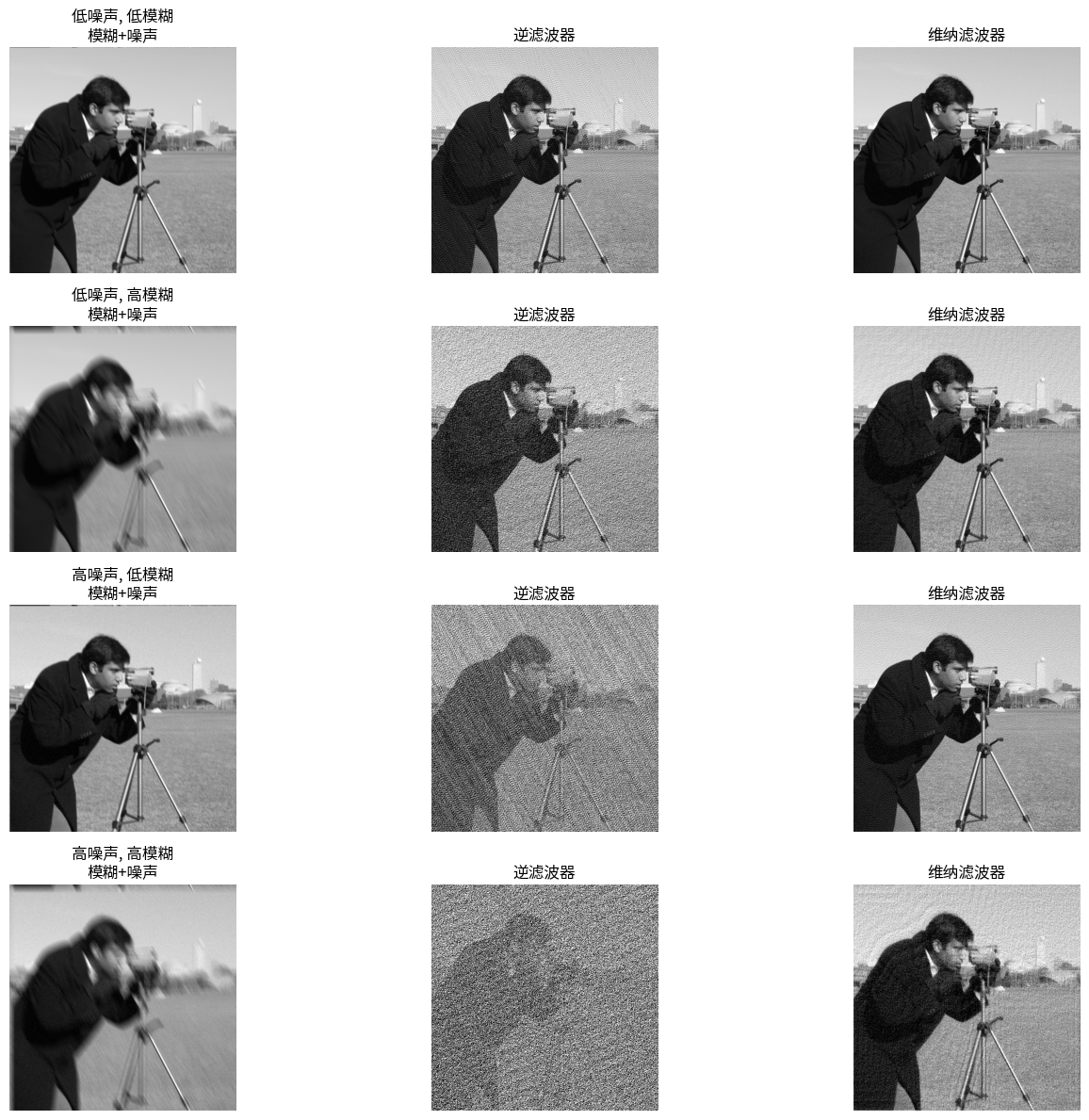
# ---------- 3. 定义测试用例 ----------
# 定义了四种场景,用于在不同的模糊(L: 运动长度)和噪声(noise_sigma)
# 条件下测试恢复算法。
cases = [
{"name": "低噪声, 低模糊", "L": 5, "theta": 30, "noise_sigma": 0.003},
{"name": "低噪声, 高模糊", "L": 25, "theta": 30, "noise_sigma": 0.003},
{"name": "高噪声, 低模糊", "L": 5, "theta": 30, "noise_sigma": 0.02},
{"name": "高噪声, 高模糊","L": 25, "theta": 30, "noise_sigma": 0.02},
]
# ---------- 4. 处理每一种情况 ----------
results = [] # 存储用于最终报告的指标。
plt.figure(figsize=(15, 12))
plot_idx = 1
for case in cases:
# --- a. 为当前情况设置参数 ---
L = case["L"] # 运动模糊的长度
theta = case["theta"] # 运动模糊的角度
noise_sigma = case["noise_sigma"] # 高斯噪声的标准差
inv_eps = 1e-3 # 用于正则化逆滤波器的Epsilon
# 估算维纳滤波器的噪声信号功率比(K)。
img_var = np.var(I)
noise_var = noise_sigma ** 2
K = noise_var / max(img_var, 1e-10) # 避免对平坦图像做除零操作
# --- b. 创建运动模糊传递函数 H ---
# H_c 是运动模糊的中心化频率响应。
H_c = motion_H(M, N, L, theta)
# H 经过移位以与numpy的FFT兼容,后者期望零频分量位于角落。
H = np.fft.ifftshift(H_c)
# --- c. 应用模糊并添加噪声 ---
F = np.fft.fft2(I) # 原始图像的FFT
G_clean = H * F # 在频域中应用模糊
g_clean = np.real(np.fft.ifft2(G_clean)) # 空间域中的模糊图像
# 向模糊图像添加合成的高斯噪声。
g = g_clean + noise_sigma * np.random.randn(M, N)
# --- d. 使用逆滤波器进行恢复 ---
G = np.fft.fft2(g) # 退化图像的FFT
Fhat_inv = inverse_filter(G, H, inv_eps) # 应用逆滤波器
I_inv = np.real(np.fft.ifft2(Fhat_inv)) # 转换回空间域
I_inv = np.clip(I_inv, 0, 1) # 将值裁剪到有效的[0, 1]范围
# --- e. 使用维纳滤波器进行恢复 ---
Fhat_wiener = wiener_filter(G, H, K) # 应用维纳滤波器
I_wiener = np.real(np.fft.ifft2(Fhat_wiener)) # 转换回空间域
I_wiener = np.clip(I_wiener, 0, 1) # 将值裁剪到有效的[0, 1]范围
# --- f. 计算性能指标 ---
# 将原始图像与退化和恢复后的版本进行比较。
mse_blur = mse(I, g)
mse_inv = mse(I, I_inv)
mse_wiener = mse(I, I_wiener)
psnr_blur = psnr(I, g)
psnr_inv = psnr(I, I_inv)
psnr_wiener = psnr(I, I_wiener)
ssim_blur = ssim_manual(I, g)
ssim_inv = ssim_manual(I, I_inv)
ssim_wiener = ssim_manual(I, I_wiener)
# 存储此案例的所有指标。
results.append({
"case": case["name"],
"mse_blur": mse_blur, "psnr_blur": psnr_blur, "ssim_blur": ssim_blur,
"mse_inv": mse_inv, "psnr_inv": psnr_inv, "ssim_inv": ssim_inv,
"mse_wiener": mse_wiener, "psnr_wiener": psnr_wiener, "ssim_wiener": ssim_wiener
})
# --- g. 绘制结果以进行视觉比较 ---
# 对于每种情况,显示:退化图像、逆滤波器结果、维纳滤波器结果。
plt.subplot(4, 3, plot_idx); plt.imshow(g, cmap='gray', vmin=0, vmax=1)
plt.title(f"{case['name']}\n模糊+噪声"); plt.axis('off')
plt.subplot(4, 3, plot_idx+1); plt.imshow(I_inv, cmap='gray', vmin=0, vmax=1)
plt.title("逆滤波器"); plt.axis('off')
plt.subplot(4, 3, plot_idx+2); plt.imshow(I_wiener, cmap='gray', vmin=0, vmax=1)
plt.title("维纳滤波器"); plt.axis('off')
plot_idx += 3
plt.tight_layout()
plt.show()
# ---------- 5. 以表格形式打印量化指标 ----------
print("\n" + "=" * 80)
print(" 所有四种情况的恢复性能指标 ")
print("=" * 80)
print(f"\n{'情况':<28}{'方法':<18}{'MSE':<12}{'PSNR(dB)':<12}{'SSIM':<10}")
print("-" * 80)
for r in results:
print(f"{r['case']:<28}{'模糊+噪声':<18}{r['mse_blur']:<12.5f}{r['psnr_blur']:<12.3f}{r['ssim_blur']:<10.4f}")
print(f"{'':<28}{'逆滤波器':<18}{r['mse_inv']:<12.5f}{r['psnr_inv']:<12.3f}{r['ssim_inv']:<10.4f}")
print(f"{'':<28}{'维纳滤波器':<18}{r['mse_wiener']:<12.5f}{r['psnr_wiener']:<12.3f}{r['ssim_wiener']:<10.4f}")
print("-" * 80)
# ====================== 辅助函数 ======================
def motion_H(M, N, L, theta):
"""
计算线性运动模糊滤波器的频率响应。
参数:
M, N (int): 图像的尺寸。
L (float): 运动模糊的长度(以像素为单位)。
theta (float): 运动的角度(以度为单位)。
返回:
H_c (ndarray): 运动模糊的中心化二维频率响应。
"""
a = L * np.cos(np.deg2rad(theta))
b = L * np.sin(np.deg2rad(theta))
# 创建一个中心化的频率网格。
U, V = freqgrid_centered(M, N)
P = a * U + b * V
# 使用sinc函数作为运动模糊模型。
S = np.ones_like(P)
nz = P != 0 # 避免在原点处除以零。
S[nz] = np.sin(np.pi * P[nz]) / (np.pi * P[nz])
# 包括相移。
H_c = S * np.exp(-1j * np.pi * P)
return H_c
def freqgrid_centered(M, N):
"""
生成一个二维中心化频率网格。
网格范围从-0.5到0.5。
参数:
M, N (int): 网格的尺寸。
返回:
U, V (ndarray): 代表频率坐标的二维数组。
"""
u = np.arange(-M//2, M//2) / M
v = np.arange(-N//2, N//2) / N
V, U = np.meshgrid(v, u)
return U, V
def inverse_filter(G, H, eps):
"""
应用正则化的逆滤波器。
F_hat = G / H,但避免了H中的小值导致的除法问题。
参数:
G (ndarray): 退化图像的FFT。
H (ndarray): 退化(模糊)的传递函数。
eps (float): 防止除以零的阈值。
返回:
Fhat (ndarray): 估计的恢复图像的FFT。
"""
Fhat = np.zeros_like(G)
# 仅在H的幅度大于阈值的地方进行除法。
mask = np.abs(H) > eps
Fhat[mask] = G[mask] / H[mask]
return Fhat
def wiener_filter(G, H, K):
"""
应用简化的维纳滤波器。
F_hat = (H* / (|H|^2 + K)) * G
参数:
G (ndarray): 退化图像的FFT。
H (ndarray): 退化(模糊)的传递函数。
K (float): 估计的噪声信号功率比。
返回:
Fhat (ndarray): 估计的恢复图像的FFT。
"""
# 频域中维纳滤波器的公式。
denom = np.abs(H)**2 + K
W = np.conj(H) / denom
Fhat = W * G
return Fhat
# ---------- 指标 ----------
def mse(I1, I2):
"""计算两幅图像之间的均方误差。"""
return np.mean((I1.astype(np.float64) - I2.astype(np.float64)) ** 2)
def psnr(I1, I2):
"""计算两幅图像之间的峰值信噪比。"""
m = mse(I1, I2)
if m == 0:
return float('inf')
# 假设像素值归一化到[0, 1]范围。
return 10 * np.log10(1.0 / m)
def ssim_manual(X, Y):
"""
计算两幅图像之间的结构相似性指数(SSIM)。
这个简化版本使用全局统计数据。
"""
# 用于稳定分母较弱的除法的常数。
C1, C2 = 0.01**2, 0.03**2
# 图像的均值、方差和协方差。
mu_x = np.mean(X)
mu_y = np.mean(Y)
sigma_x = np.var(X)
sigma_y = np.var(Y)
sigma_xy = np.mean((X - mu_x) * (Y - mu_y))
# SSIM 公式。
numerator = (2 * mu_x * mu_y + C1) * (2 * sigma_xy + C2)
denominator = (mu_x**2 + mu_y**2 + C1) * (sigma_x + sigma_y + C2)
return numerator / denominator
# ====================== 运行 ======================
# 该脚本设计为在Jupyter环境中运行,其中'main()'被显式调用。
if __name__ == "__main__":
main()
================================================================================
所有四种情况的恢复性能指标
================================================================================
情况 方法 MSE PSNR(dB) SSIM
--------------------------------------------------------------------------------
低噪声, 低模糊 模糊+噪声 0.00529 22.767 0.9680
逆滤波器 0.01882 17.255 0.8945
维纳滤波器 0.00159 27.999 0.9906
--------------------------------------------------------------------------------
低噪声, 高模糊 模糊+噪声 0.01702 17.691 0.8922
逆滤波器 0.07051 11.518 0.6543
维纳滤波器 0.00691 21.606 0.9597
--------------------------------------------------------------------------------
高噪声, 低模糊 模糊+噪声 0.00568 22.456 0.9657
逆滤波器 0.20589 6.864 0.2393
维纳滤波器 0.00797 20.988 0.9535
--------------------------------------------------------------------------------
高噪声, 高模糊 模糊+噪声 0.01739 17.596 0.8901
逆滤波器 0.27327 5.634 0.1019
维纳滤波器 0.01092 19.616 0.9356
--------------------------------------------------------------------------------
结论¶
噪声模型催生了简单的滤波器(均值/中值)和变分去噪(TV)。对于模糊,反卷积需要一个PSF;维纳滤波是超越朴素反演的稳健基线。
参考文献¶
A. Buades, B. Coll, J.-M. Morel, “A non-local algorithm for image denoising”, CVPR, 2005.
A. Chambolle, “An Algorithm for Total Variation Minimization and Applications”, Journal of Mathematical Imaging and Vision, vol. 20, p. 89--97, 2004.
L.B. Lucy, “An iterative technique for the rectification of observed distributions”, Astronomical Journal, vol. 79, no 6, p. 745--754, 1974.
W.H. Richardson, “Bayesian-based iterative method of image restoration”, Journal of the Optical Society of America, vol. 62, no 1, p. 55--59, 1972.
L.I. Rudin, S. Osher, E. Fatemi, “Nonlinear total variation based noise removal algorithms”, Physica D, vol. 60, no. 1--4, p. 259--268, 1992.